Simulation of the cutting fluid effect in the machining process by means of fluid structure interaction simulation
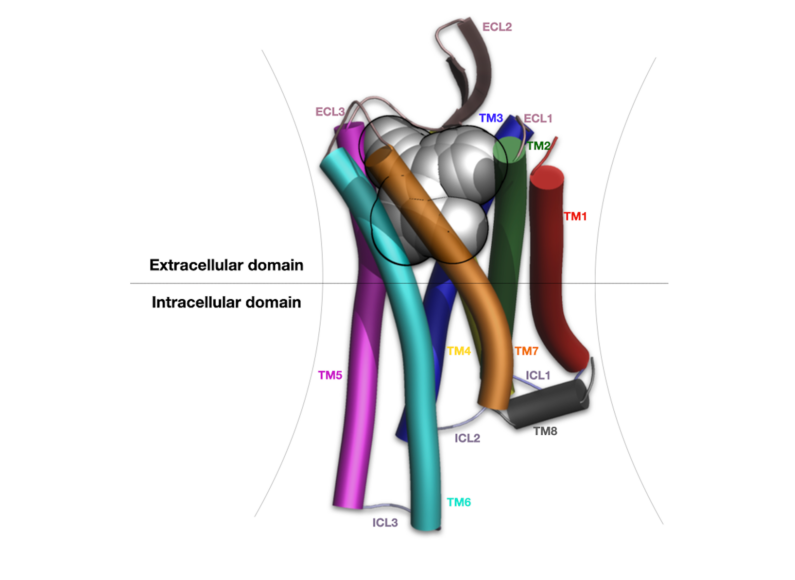
Computational exploration of small molecule binding to gastrin-releasing peptide receptor for precision medicine